















 29 / 50
29 / 50

u
x
u
y
u
z
d
u
y
–––– = –
w
z
u
x
+
w
x
u
z
=
w
x
w
y
w
z
=
w
×
u
y
,
dt
0
1
0
u
x
u
y
u
z
d
u
z
–––– =
w
y
u
x
–
w
x
u
y
=
w
x
w
y
w
z
=
w
×
u
z
.
dt
0
0
1
Vediamo così che esiste un vettore
w
tramite il quale si possono scrivere tutte e tre le
derivate. La dimostrazione è valida per qualsiasi terna cartesiana trirettangola e quindi in
particolare per il sistema
O
'.
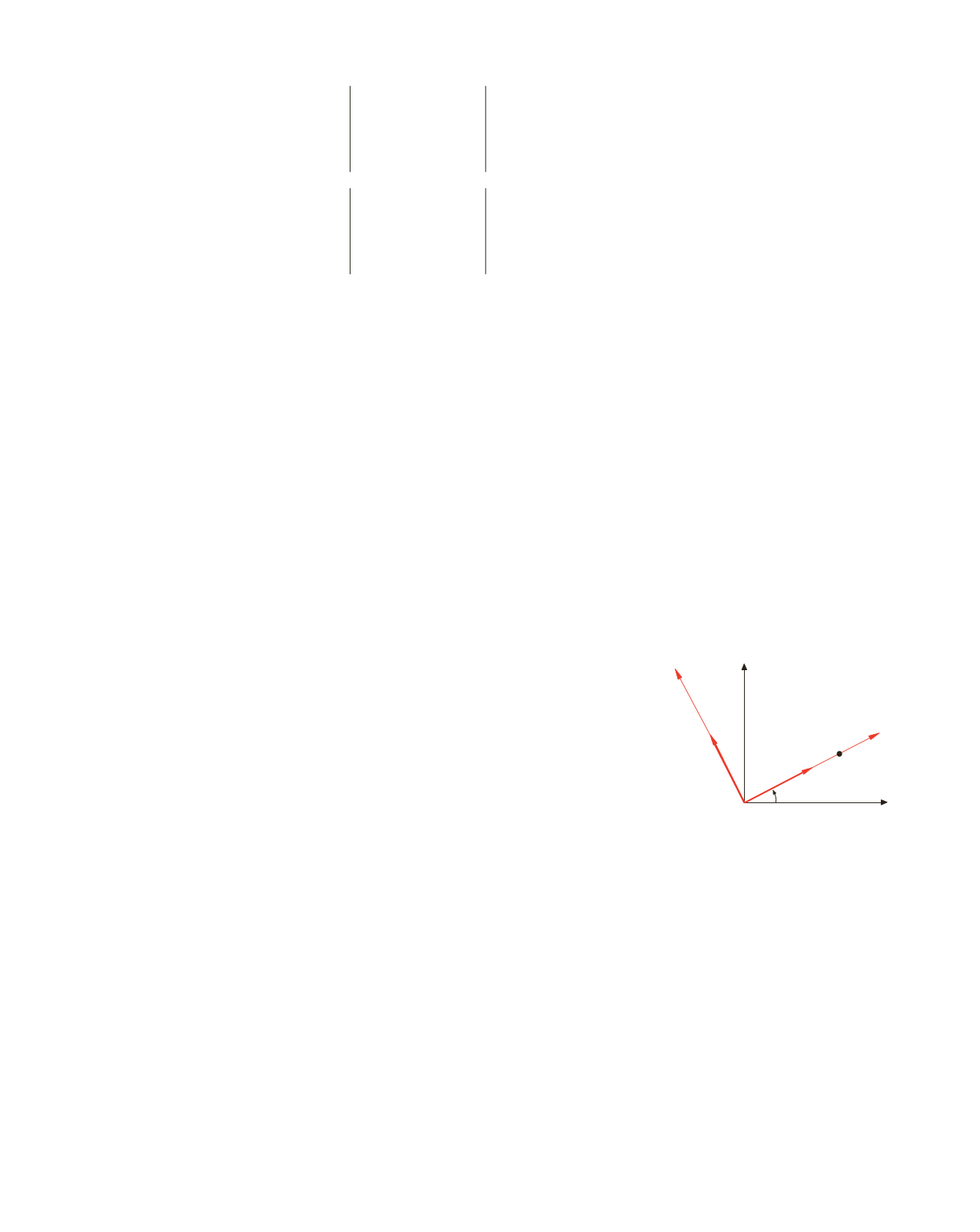
Nota sui sistemi di riferimento in coordinate polari
Nella descrizione del moto piano in coordinate polari il punto
P
è individuato dalla
distanza
r
dal polo
O
e dall’angolo
q
formato da
r
con un asse di riferimento. Chiamiamo
fisso il sistema
x
,
y
e mobile il sistema definito dai versori
u
r
e
u
q
, che rispetto al sistema
fisso ruota con velocità angolare
w
=
d
q
/
dt
. Una caratteristica di questo sistema mobile è che
il punto
P
si trova sempre sull’asse
x
', per cui il moto relativo è rettilineo con
dr
d
2
r
v
' = –––
u
r
,
a
' = –––
u
r
.
dt
dt
2
Confrontando le espressioni in notazione polare per la velocità (1.19) e l’accelerazione
(1.23), introdotte nel primo capitolo, e le relazioni (3.4) e (3.7), ci accorgiamo che sono iden-
tiche. Infatti
dr d
q
v
= –––
u
r
+
r
–––
u
q
=
v
' +
w
×
r
dt
dt
d
2
r d
q
2
d
2
q
d
q
dr
a
= ––––
u
r
–
r
(
–––
)
u
r
+
r
––––
u
q
+ 2 ––– –––
u
q
=
dt
2
dt
dt
2
dt dt
d
w
=
a
' +
w
×
(
w
×
r
) + ––––
×
r
+ 2
w
×
v
' .
dt
In effetti il moto piano in coordinate polari è riferito ad un particolare sistema mobile e
quindi, per essere riferito al sistema fisso
x
,
y
, deve obbedire ai teoremi del moto relativo.
3.8 Teoria della relatività. Trasformazioni di Lorentz
La proprietà più notevole che abbiamo trovato studiando il moto relativo è la
relatività galileiana, che ora riformuliamo così: le leggi della meccanica sono inva-
rianti rispetto alle trasformazioni tipo (3.11), che legano le coordinate di due siste-
mi di riferimento in moto rettilineo uniforme l’uno rispetto all’altro. Un fenomeno
osservato e spiegato in un sistema ha la stessa spiegazione dinamica nell’altro: la
cinematica è diversa perché diverse sono le condizioni iniziali, ma la legge fisica è
la stessa, nella sostanza e nella struttura. Da ciò segue tra l’altro che con esperimen-
ti di meccanica compiuti in sistemi inerziali non è possibile mettere in evidenza se
il sistema di riferimento è in moto o è in quiete, fatto rilevato già da Galileo.
Teoria della relatività. Trasformazioni di Lorentz
109
y
'
y
q
P
x
x
'
u
r
u
q
Figura 3.18