















 23 / 50
23 / 50

Per l’osservatore
O
il punto è in quiete, mentre per quello ruotante
O
' il punto
descrive un moto circolare uniforme, in base a (3.13) e (3.14). Infatti nei due siste-
mi il moto del punto ha queste caratteristiche:
sistema
O
v
= 0 ,
a
= 0
sistema
O
'
v
' = –
w
×
r
,
a
' =
–
w
×
(
w
×
r
) – 2
w
×
(–
w
×
r
) =
w
×
(
w
×
r
).
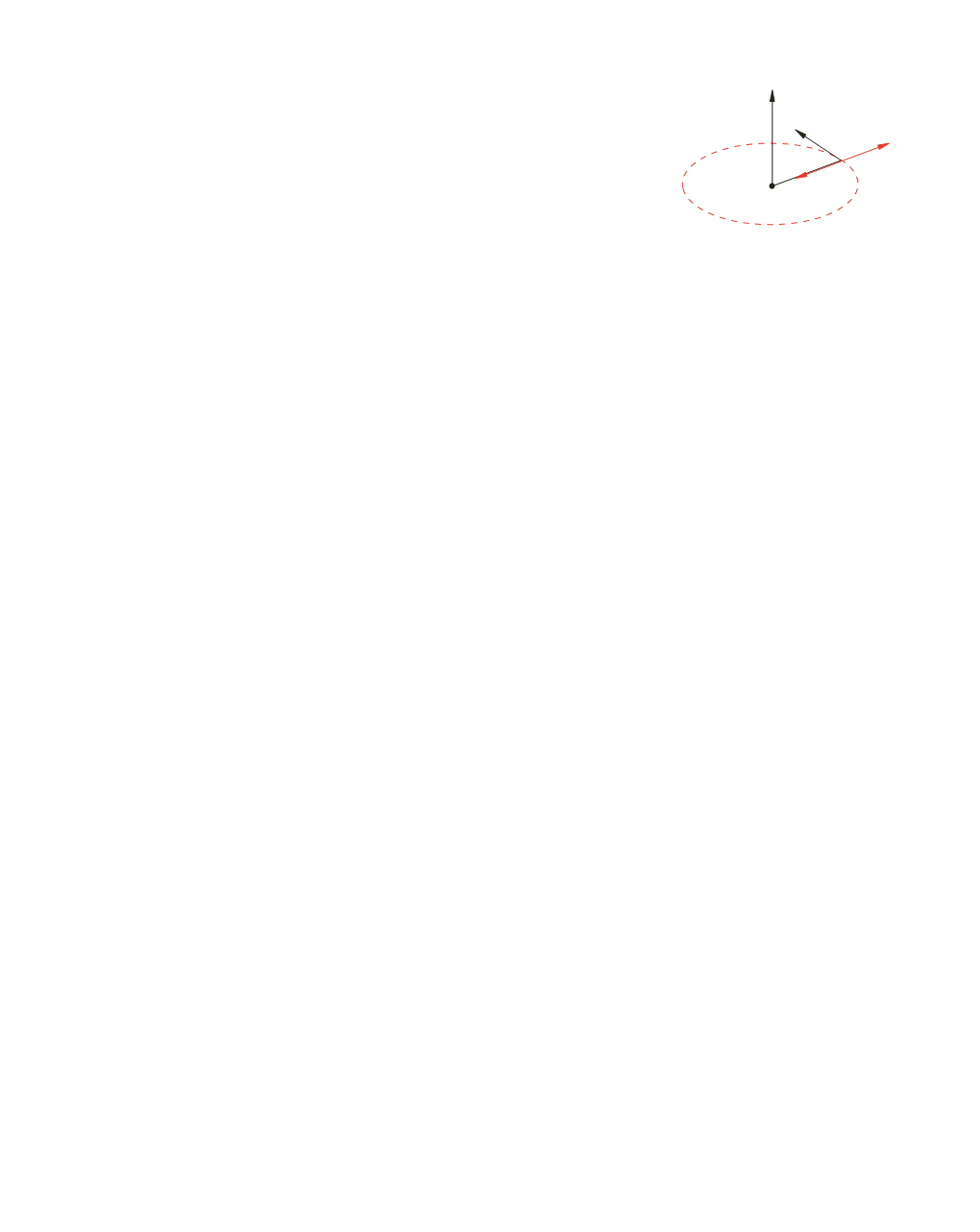
Pertanto nel sistema
O
' accelerato il punto descrive una circonferenza in verso con-
trario al moto del disco, con velocità costante in modulo e pari a
w
r
e con accelera-
zione, puramente centripeta, di valore
w
2
r
(in figura 3.10 è mostrata la traiettoria
che è percorsa in senso orario in quanto il disco ruota in senso antiorario). Però
O
'
deve ipotizzare che sul punto agiscono due forze (centrifuga e di Coriolis) le quali,
combinandosi, comunicano al punto l’accelerazione
a
'; resta per
O
' il problema
dell’origine di queste forze.
Leghiamo ora il punto con un filo all’asse di rotazione e diamogli una velocità
di modulo
w
r
in modo tale che ruoti con la stessa velocità del punto del disco su cui
si trova. La situazione è opposta a quella precedente: per
O
il punto descrive un
moto circolare uniforme sotto l’azione della tensione del filo, mentre
O
' vede il
punto fermo,
v
' = 0 e
a
' = 0; tutto ciò è in accordo con (3.13) e (3.14). Però
O
'
osserva pure che il filo è teso malgrado il punto sia fermo e quindi è costretto a sup-
porre che sul punto agisca una forza diretta verso l’esterno, che chiama forza cen-
trifuga, bilanciata dalla tensione del filo.
Per verificare la sua ipotesi
O
' traccia un segno radiale sul disco e recide il lega-
me tra il punto e l’origine degli assi, immaginando di vedere il punto allontanarsi
radialmente sotto l’azione della forza centrifuga, in quanto è stata annullata la forza
esercitata dal filo. In effetti
O
' osserva ora un moto del punto materiale, però lungo
una traiettoria curvilinea, e deve quindi ammettere, come già fatto per il primo
esempio, che sui punti in moto nel suo sistema di riferimento (
v
'
≠
0) agisca un’altra
forza che non si manifesta quando sono in quiete; si tratta precisamente della forza
di Coriolis. È chiaro che
O
dà un’altra interpretazione dell’ultima fase dell’esperi-
mento, cioè dopo il taglio del filo. Infatti nel sistema inerziale il punto materiale
all’istante in cui viene lasciato libero inizia a muoversi di moto rettilineo uniforme
con direzione tangente alla circonferenza nella posizione in cui avviene il distacco
dal vincolo (filo). Le accelerazioni nei due sistemi sono:
a
= 0 ,
a
'
=
–
w
×
(
w
×
r
) – 2
w
×
v
' .
Il problema che si presenta ad
O
' è sempre la comprensione dell’origine della forza
centrifuga e di quella di Coriolis.
La figura 3.11 mostra le posizioni del punto libero viste dai due osservatori
negli istanti zero,
T/
12,
T
/6,
T
/4 se
T
è il periodo di rotazione del disco, ovvero del
sistema non inerziale.
Riprendiamo ora in esame il problema del
pendolo conico
, discusso nel terzo e-
sempio del paragrafo 2.13, considerando un sistema con origine sull’asse verticale e
ruotante con la stessa velocità angolare del pendolo. In questo sistema, non inerziale,
il pendolo è immobile e forma con la verticale l’angolo
q
tale che tg
q
=
w
2
r
/
g
. Siamo
in una situazione di equilibrio statico, che necessita l’introduzione di una forza che
bilanci la risultante della tensione del filo e del peso. Tale forza è la forza centrifuga,
che esiste solo in questo sistema, e vale
F
centr
= –
m g
tg
q
u
N
= –
m
w
2
r
u
N
;
u
N
è un ver-
sore orizzontale diretto verso l’asse attorno a cui ruota il pendolo.
Notiamo che se il moto di trascinamento è rotatorio, uniforme o vario, è sem-
pre
a
t
≠
0 e quindi non può mai sussistere l’eguaglianza
a
=
a
'. Non esiste cioè
l’analogo rotatorio della relatività galileiana: in un sistema rotante è sempre possi-
bile mettere in evidenza la rotazione (e più in generale in un sistema non inerziale
l’accelerazione
a
t
), cioè accorgersi di essere in movimento.
Moto di trascinamento rotatorio uniforme
103
w
w
×
r
1
w
×
(
w
×
r
)
2 –
w
×
(
w
×
r
)
r
O
1
2
Figura 3.10