















 16 / 50
16 / 50

vengono pertanto chiamate anche
forze di inerzia
, appaiono agenti solo nel sistema
non inerziale, dove costituiscono il termine correttivo che permette di ritornare ad
una espressione
F
' =
m
a
'. È chiaro che
le forze apparenti non derivano dalle intera-
zioni fondamentali e non esistono in un sistema di riferimento inerziale
.
Riteniamo che ora sia evidente l’importanza di riferire le misure ad un sistema
inerziale. In tale sistema infatti la descrizione di un fenomeno dinamico è più sem-
plice e più aderente a quelli che supponiamo siano i meccanismi fisici di base. Se
osserviamo in un sistema inerziale un punto materiale che descrive una traiettoria
curva possiamo affermare che su di esso agisce una forza (vera); se
F
= 0 sappia-
mo che il moto è rettilineo uniforme e viceversa.
In un sistema accelerato vediamo da (3.10) che
F
= 0 non comporta
a
' = 0 e
quindi l’osservazione di un moto rettilineo uniforme. Questo risultato giustifica il
nome di sistema
non inerziale
per un sistema accelerato. Analogamente, una traiet-
toria curva non presuppone necessariamente l’azione di una forza (vera), ma può
essere un effetto
apparente
, conseguenza del moto accelerato del sistema in cui si
trova l’osservatore, e così via.
Sottolineamo che tutto ciò non significa che la descrizione nel sistema inerzia-
le è corretta, mentre quella nel sistema non inerziale è sbagliata. In entrambi i siste-
mi, note le condizioni iniziali del moto e le forze agenti, facciamo previsioni cor-
rette per il moto di un punto tramite (2.1) o (3.10). Però nel sistema non inerziale la
descrizione è più complicata, dovendosi introdurre termini correttivi non prove-
nienti dalle interazioni fondamentali. Un osservatore che vivesse sempre in un
sistema non inerziale potrebbe avere difficoltà a comprendere che agiscono delle
forze con una struttura complessa come quella nella (3.10) e non soltanto un’unica
forza
F
'.
Nei prossimi paragrafi presenteremo vari esempi di moti osservati da due sistemi
di riferimento diversi, di cui almeno uno inerziale. Utilizzeremo le reazioni (3.1),
(3.4), (3.7) e (3.10) valide per qualsiasi coppia di sistemi. Assumeremo come inerzia-
le il sistema con origine
O
, mentre l’altro avrà origine in
O
' e metteremo in evidenza
cosa misurano due osservatori, detti per brevità
O
e
O
', solidali con i due sistemi.
Questi due osservatori, che possono comunicare tra loro, sono esperti nella
Fisica e cercano di cogliere il significato delle loro misure. Dall’esame di queste
comprenderemo la diversità della cinematica e la differente interpretazione dina-
mica che si possono avere per uno stesso fenomeno visto da due sistemi in moto
relativo tra loro.
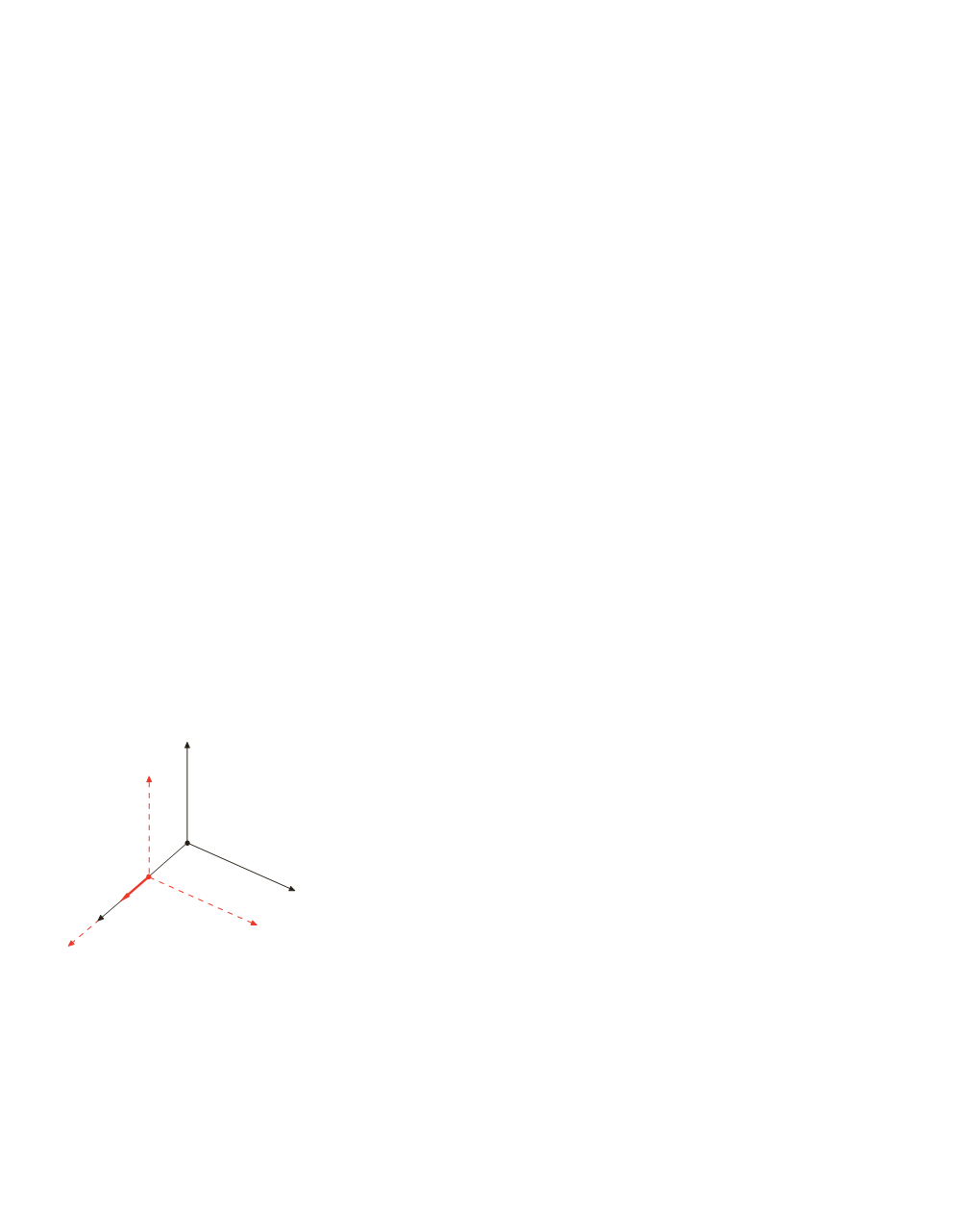
3.3 Moto di trascinamento rettilineo uniforme
Consideriamo due sistemi inerziali in moto rettilineo uniforme l’uno rispetto
all’altro e mettiamoci nel caso semplice, che non è però limitativo, rappresentato in
figura 3.2. Gli assi dei due sistemi sono paralleli ed il sistema di origine
O
' si sposta
con velocità costante
v
O
'
parallela all’asse
x
. Inoltre all’istante
t
= 0 le origini coin-
cidono così che
OO
' =
v
O
'
t
.
Proiettando sugli assi la relazione
r
' =
r
–
OO '
, che lega le posizioni di un punto
P
nei due sistemi di riferimento otteniamo
x
' =
x
–
v
O
'
t
,
y
' =
y
,
z
' =
z
.
(3.11)
Analogamente per le velocità, utilizzando (3.4), si ha
v
' =
v
–
v
O
'
e quindi
v
'
x
=
v
x
–
v
O
'
,
v
'
y
=
v
y
,
v
'
z
=
v
z
.
(3.12)
96
Moti relativi
Sistema non inerziale
Trasformazione galileiana
z
z
'
O
O
'
y
y
'
x
x
'
v
O
'
Figura 3.2