














 29 / 38
29 / 38

La
cinematica
è quella parte della meccanica che si interessa del moto di un
corpo, indipendentemente dalle cause che producono il moto stesso. Il moto
è un concetto relativo. È possibile definire che un corpo si trova in quiete o in
moto solo avendo a disposizione un sistema di riferimento, costituito ad esem-
pio da altri corpi che possono essere considerati fissi. Per semplicità in cinema-
tica si considera che il corpo che si muove sia un corpo puntiforme, detto
anche
punto materiale
.
2.1
Posizione e traiettoria
Si dice che un corpo è in moto quando la sua posizione, rispetto ad un sistema
di riferimento di assi cartesiani, varia nel tempo.
Considerato un sistema di riferimento, la
posizione
r
(
t
) di un punto nell’i-
stante
t
è un vettore che unisce l’origine degli assi al punto stesso. Se il punto
si muove, allora la posizione è funzione del tempo.
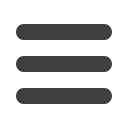
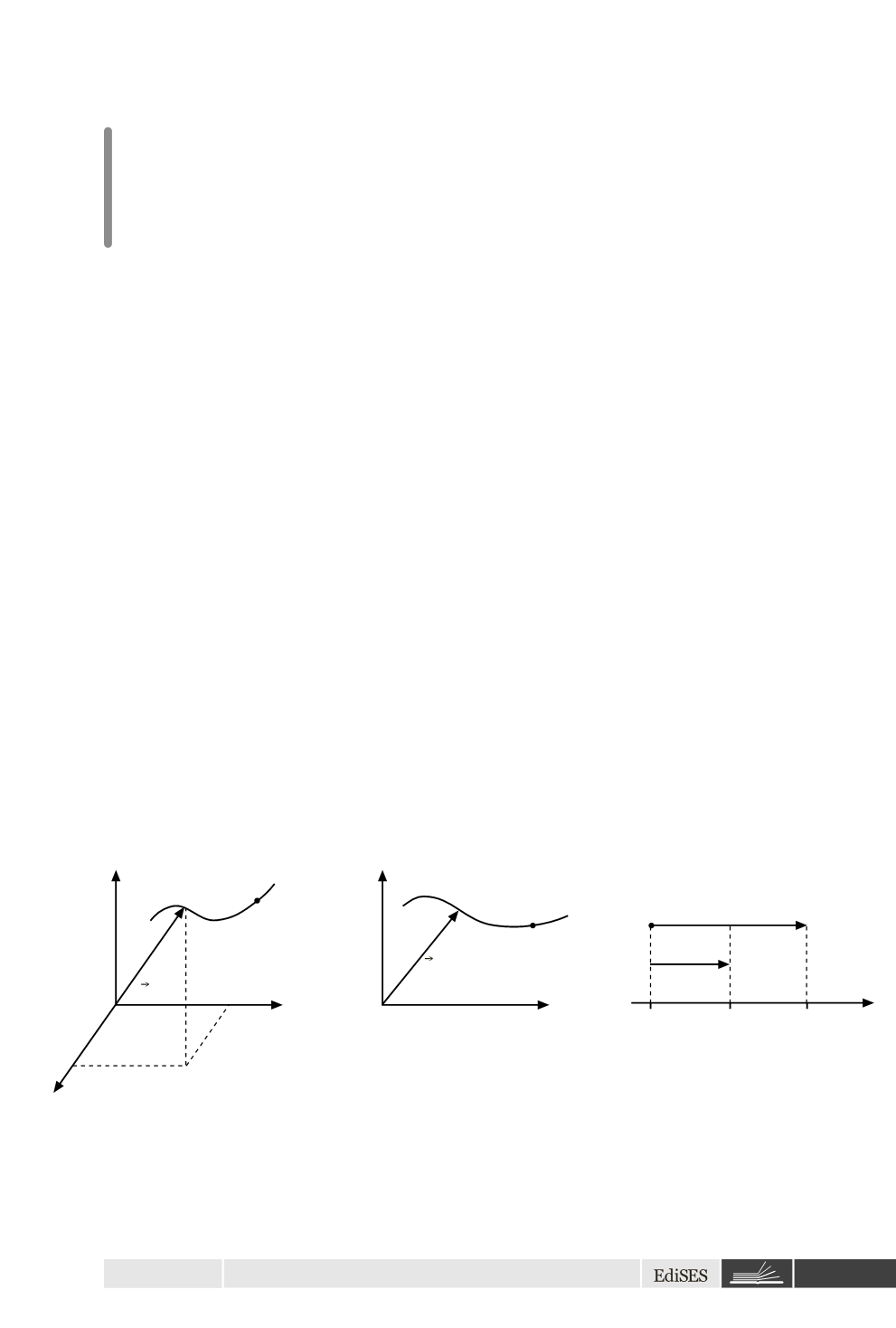
Si chiama
traiettoria di punto in movimento
la linea che unisce tutte le posi-
zioni da esso occupate in istanti di tempo successivi (Fig. 2.1a, b, c).
www.
edises
.it
y
x
z
P(
t
1
)
P(
t
2
)
r
(
t
1
)
P(
t
1
)
y
x
O
O
r
(
t
1
)
P
0
P
1
P
2
x
x
(
t
1
)
x
(
t
2
)
P(
t
2
)
Figura 2.1 (a)
Il punto P si muove nello spazio. Il moto è descritto da tre funzioni
x = x(t), y = y(t), z = z(t).
(b)
Il punto P si muove su un piano. Il moto è descritto da
due funzioni x = x(t), y = y(t).
(c)
Il punto P si muove lungo una retta. Il moto è
descritto da una funzione x = x(t).
(a)
(b)
(c)
Capitolo 2
Cinematica